Китайские ученые создали роботизированную руку с полным тактильным восприятием
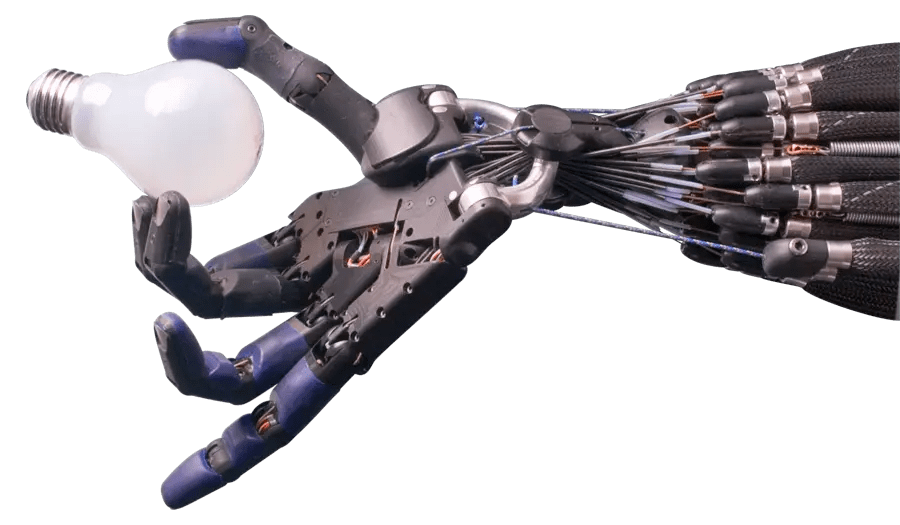
Международная команда исследователей из Пекинского университета, Пекинского института общего искусственного интеллекта (Bigai) и Лондонского университета Куинн Мэри разработала новую руку с роботизированной рукой (полноотранная антропоморфная кибернетическая рука). Исследование было опубликовано в выпуске июня 2025 года с помощью Nature Machine Intelligence.
Основным достижением развития является интеграция полного тактильного восприятия высокого разрешения, сохраняя при этом все двигательные функции роботизированной руки. Система имеет 17 тактильных датчиков с высоким разрешением в шести различных конфигурациях, которые охватывают 70% поверхности устройства с пространственным разрешением 0,1 мм.
Ведущий автор исследования, доктор Яо Дийханг, отмечает, что Дизайн руки F-Tac имитирует биологическую архитектуру человеческой руки, где тактильные рецепторы на коже взаимодействуют с механизмами нервного лечения в мозге.
Инновация проекта состоит в двойной функциональности датчиков, которые действуют как сенсорные, так и структурные элементы. Это обеспечивает беспрецедентное тактильное покрытие, не жертвуя структурной гибкостью. Плотность тактильных пикселей достигают 10 000 за квадратный сантиметр, что намного превосходит существующие коммерческие аналоги.
Генеративный алгоритм, разработанный командой, позволяет роботизированной руке воспроизводить 19 типов человеческих схватков и адаптироваться к изменяющимся условиям реального времени.
В 600 практически экспериментировании рука F-TAC демонстрирует 100% успех для сложных задач для манипулирования объектами, в то время как стандартные роботизированные руки без тактильной обратной связи достигают успеха только в 53,5% случаев. Система может переключаться на альтернативные решения в течение 0,1 секунды, когда обнаруживаются препятствия.
Профессор Каспар Альтфер из Лондонского университета Куинн Мэри подчеркнул уникальность развития, отметив беспрецедентную комбинацию высокого пространственного разрешения с широко покрытой поверхностью.
Создание руки F-TAC является частью общей тенденции внедрения тактильных технологий в робототехнике. Другие замечательные события в 2024-2025 годах включают трехмерную кожу для роботов из Университета Цинхуа, роботизированную руку с подвижной ладонь швейцарских ученых, мультимодальный тактильный датчик из китайской академии наук и роботизированную руку с четырьмя пальцами и художественными тактильными тактильными ягодицами из университета Университета.
Исследователи говорят, что их работа важна не только для практического применения в хирургии и промышленной автоматизации, но и для разработки машинного интеллекта в целом, что показывает важность стабильных сенсорных возможностей для строительства систем, которые близки к общему искусственному интеллекту.