Mumuta: роботизированная рука с клетками человека — новая эра в Biybrid Robotics
Ученые обнаружили, как защитить ткани искусственного некроза — решение неожиданно гастрономическое.
Роботы биохид объединяют биологические компоненты, такие как мышцы, растительные ткани и даже грибы с не -биологическими материалами. Мы уже научились создавать надежные искусственные структуры, но все еще трудно поддерживать органические компоненты. Следовательно, роботы, использующие биологические мышцы, остаются небольшими и упрощенными — не более нескольких дюймов в длину, с одной или двумя движущимися частями.
«Увеличение размера бибрид -роботов является проблемой из -за слабого сокращения лабораторных мышц, риска некроза в густые мышечные ткани и трудности в интеграции биологических приводов с искусственными структурами», — объясняет профессор Шодзи Такеучи из Токио Университета.
У него и его команды разработали полноразмерную 18-см биибридную руку, в которой все пять пальцев управляются лабораторными человеческими мышцами.
Проблема выживания
Один из основных проблем в создании больших роботов биибрида остается некроз — Клеточная гибель из -за отсутствия кислорода и питательных веществ. В лаборатории мышцы выращиваются в питательной среде, которая обеспечивает им все, что им нужно. В то время как ткань остается тонкой и плоской, нет проблем — каждая ячейка получает достаточно кислорода.
Но по мере того, как мышцы становятся толстыми и мощными, клетки глубоко в них теряют доступ к питательным веществам и умирают. В живых организмах эта проблема решается с помощью системы кровеносных сосудов, но в искусственно выращенных тканях еще невозможно создать ее. Такие и его команда находят окруженный вариант — суши -ролики.
Исследователи начинают с выращивания тонких мышечных волокон, расположенных рядом в чашке Петри. Это позволило им получать кислород и оставаться здоровыми. Когда мышцы достигли необходимого размера, они были свернуты в цилиндрические структуры, называемые Мумута (множественные приводы мышечной ткани).
«Мумута создается тонкими мышечными слоями, свернутыми в цилиндрах, что улучшает их сократимость и позволяет кислороду проникать», — объясняет Такеучи.
Движение в Мумуте вызвано электрическими импульсами, поставляемыми электродами по краям. В зависимости от того, какие волокна сокращаются, эти «мышечные рулеты» могут сгибаться или вращаться. Интенсивность сокращения контролируется путем изменения натяжения.
Следуя успешным тестам Mumuta, исследователи начали использовать их для управления пальцами биоридной руки.
Камень, ножницы, бумага
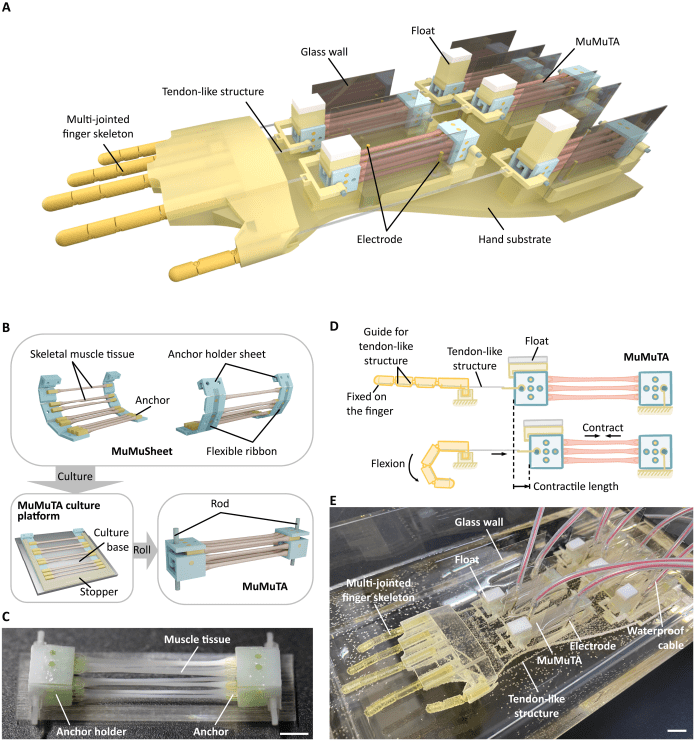
Рука была 3D-полученная пластика и подвешена в жидкой среде. Каждый палец состоит из трех суставов и контролируется кабелями, подключенными к mumutas, которые расположены в предплечье. Чтобы минимизировать влияние электрических полей, механизмы привода помещаются в стеклянные контейнеры, а затем прикрепляются к пластиковой раме.
Когда исследователи сокращают разные mumuta, рука может выполнять разные жестыв том числе знаки из игры «камень, ножницы, бумага», а также держат такие объекты, как пипетка. Основным преимуществом Mumuta была их прочность: каждый механизм привода развивает 8 Millinuton — достаточно, чтобы поднять скрепку. Кроме того, мышцы могут разворачиваться после использования, что дает им доступ к кислороду и питательным веществам, что продлевает их жизнь.
Но нет недостатковС Во -первых, пальцы могут сгибаться только на одну сторону — мышцы сокращаются, но они должны полагаться на поплавок материала, чтобы вернуться в их первоначальное положение. В человеческой руке эта проблема решается антагонистическими мышцами, работающими парами. Сусучи предложил два решения: использование упругих материалов в суставах для упругих возвратов или добавление пяти дополнительных мумутов для двустороннего движения.
Вторая проблема заключается в том, что рука может работать только в жидкой среде. Перемещение в сухие условия потребует искусственной системы для снабжения питательных веществ и защитных структур для поддержания жизнеспособности тканей.
Но самая очевидная нерешенная проблема для биомаскулов остается усталостьС
Биохибридные роботы нуждаются в обучении
Во время тестов было обнаружено, что При интенсивной нагрузке сила усадки Мумуты уменьшается всего за несколько минутС После 10 минут работы мышцы устают, а восстановление занимает около часа. В то же время эти ткани не испытывали таких нагрузков, как истинные человеческие мышцы в лаборатории.
Максимальная специфическая сила аббревиатуры, достигнутая в эксперименте, составляет 0,7 фрезерных сетей на квадратный миллиметр — хорошую величину для лабораторных мышц, но только около 12% от живой ткани (6 миллионетов на квадратный миллиметр).
Takeuchi считает, что физическое воспитание может быть решением.
«Как и естественные мышцы, искусственные мышцы могут улучшить их выносливость и силу с помощью регулярных упражнений», — убежден он.
Другим вариантом является использование химических факторов роста для усиления сокращений. Это уже больше похоже на «допинг» для биобридных мышц.
По мере того, как мягкие роботы и сложные зубные протезы становятся все более распространенными, сочетание живой ткани и механизмов все еще относительно редко. Сфера биовидно -науки находится на ранних стадиях развития, с лишь несколькими примерами, такими как искусственная рыба, управляемая сердечными клетками человека или роботами, использующими травяные уши. Эта новая рука биибрида является значительным шагом вперед в практическом применении этой технологии.
Работа Такеучи и его команды была опубликована в научной робототехнике.